单芯片集成电路优化自适应转向大灯系统的设计与软件开发
随着汽车智能化和安全性能要求的不断提升,自适应转向大灯系统已成为现代高端汽车的标准配置。该系统能够根据车辆的转向角度、行驶速度以及环境光线条件,实时调整前照灯的照射方向和范围,有效扩大驾驶员的夜间视野,显著提升行车安全。传统方案多采用多芯片分布式架构,存在成本高、系统复杂、响应延迟等问题。本文将探讨基于单芯片集成电路的设计方案,并阐述其配套软件开发的关键技术,以实现更高效、可靠且经济化的自适应转向大灯系统。
一、 系统架构与单芯片集成优势
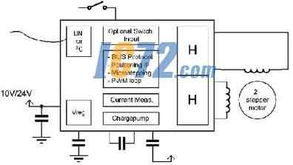
本设计核心在于采用一款高度集成的片上系统(SoC)或微控制器单元(MCU),将传感器信号处理、控制逻辑运算、驱动输出以及通信接口等功能整合于单一芯片。主要优势包括:
- 成本与空间优化:减少外围元件数量,降低物料成本和PCB面积,利于系统小型化。
- 性能与可靠性提升:芯片内部高速总线通信,避免了多芯片间的通信延迟与干扰,提高了系统响应速度与稳定性。
- 功耗降低:集成化设计减少了芯片间驱动功耗,整体能效更高。
- 开发简化:统一的开发环境和工具链,有利于软硬件协同设计与调试。
系统硬件架构主要包括:
- 核心处理单元:高性能MCU/SoC,负责运行核心控制算法。
- 传感器模块:集成或外接转向角传感器、车速传感器、环境光传感器及车身水平传感器等。
- 执行机构:步进电机或伺服电机驱动的灯组。
- 通信接口:CAN/LIN总线,用于与车辆其他系统(如ESP、仪表盘)进行数据交互。
- 电源管理与保护电路。
二、 关键硬件设计考量
- 芯片选型:需选择具备充足计算能力(如ARM Cortex-M系列内核)、丰富外设(高精度ADC、PWM输出、CAN控制器)和良好扩展性的芯片。
- 传感器接口设计:确保模拟信号采集的精度与抗干扰能力,数字接口(如SPI/I2C)的通信可靠性。
- 电机驱动电路:设计高效的功率驱动电路,并集成过流、过热保护功能。
- EMC/EMI设计:汽车电子对电磁兼容性要求严苛,需在PCB布局布线和屏蔽方面进行优化。
三、 软件开发流程与核心技术
软件开发是系统智能化的灵魂,遵循V模型或敏捷开发流程,确保功能安全(如ISO 26262标准)。主要软件层次包括:
- 底层驱动与硬件抽象层(HAL):
- 为传感器、执行器、通信总线等编写稳定的驱动程序。
- 建立硬件抽象层,提升代码可移植性和可维护性。
- 中间件与实时操作系统(RTOS):
- 采用RTOS(如FreeRTOS、AUTOSAR OS)进行任务调度与管理,确保关键控制任务的实时性。
- 集成CAN/LIN协议栈,实现可靠的车辆网络通信。
- 核心控制算法:
- 转向角度映射算法:根据实时转向角与车速,通过查表或模型计算理论灯光偏转角度。需考虑转向非线性与延迟补偿。
- 动态调整算法:结合车身俯仰/侧倾信息(来自水平传感器),补偿因车辆姿态变化造成的灯光偏移。
- 环境光适应算法:根据环境光强自动切换远近光灯或调整亮度,避免眩目。
- 故障诊断与容错处理:持续监控传感器与执行器状态,在出现故障时进入安全模式(如保持灯光居中或恢复默认位置)。
- 应用层与标定工具:
- 开发上层应用逻辑,整合各算法模块。
- 开发PC端标定工具,用于生产线或售后调试,对不同车型参数(如轴距、灯组安装位置)进行快速标定与校准,确保灯光模式符合法规要求。
四、 集成测试与验证
在硬件原型与软件开发完成后,需进行 rigorous 测试:
- 单元测试与集成测试:验证每个软件模块及硬件接口功能。
- 硬件在环测试:使用HIL测试台架,模拟各种传感器输入和车辆动态,验证系统整体响应。
- 实车道路测试:在不同路况、车速和天气条件下进行最终验证,确保其安全性、舒适性与可靠性。
五、 与展望
采用单芯片集成电路方案设计自适应转向大灯系统,通过硬件的高度集成与软件的深度优化,能够有效提升系统性能、降低成本并加速开发周期。随着芯片算力的不断增强和AI技术的引入,未来的自适应大灯系统将更加智能化,例如通过图像识别预判弯道轨迹,或实现更精细的光型分区控制,从而为智能驾驶辅助系统提供更强大的感知与照明支持。成功的开发依赖于精密的硬件设计、鲁棒的软件架构以及严格的测试验证流程的紧密结合。
如若转载,请注明出处:http://www.6shuju.com/product/33.html
更新时间:2026-06-19 19:48:32